2.5. SciPY#
last update: May 09, 2024
SciPy is a collection of mathematical algorithms and convenience functions built on the NumPy extension of Python. - scippy doc
In this page, you see examples of scipy functions (differentiation, integration, optimization) to solve problems.
import numpy as np
import matplotlib.pyplot as plt
from scipy import integrate, diff, optimize
from IPython.display import display, Latex
2.5.1. Differentiation#
scipy.integrate.solve_ivp#
Solve an initial value problem for a system of ODEs.
scipy.integrate.solve_ivp(fun, t_span, y0, method='RK45', t_eval=None,\ dense_output=False, events=None, vectorized=False, args=None, **options)
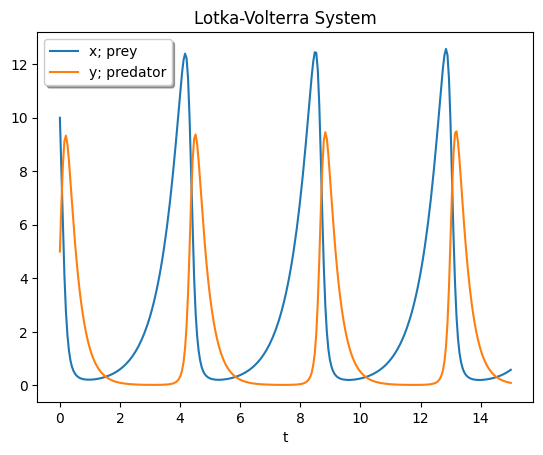
Solve the Lotka-Volterra equations. The Lotka-Volterra equations, also known as the predator-prey equations, are a pair of first-order, non-linear, differential equations frequently used to describe the dynamics of biological systems in which two species interact, one as a predator and the other as prey. They were proposed independently by Alfred J. Lotka in 1925 and Vito Volterra in 1926.
from scipy.integrate import solve_ivp
def lotkavolterra(t, z, a, b, c, d):
x, y = z
return [a * x - b * x * y, -c * y + d * x * y]
sol = solve_ivp(lotkavolterra, [0, 15], [10, 5], args=(1.5, 1, 3, 1), dense_output=True)
t = np.linspace(0, 15, 300)
z = sol.sol(t)
plt.plot(t, z.T)
plt.xlabel("t")
plt.legend(["x; prey", "y; predator"], shadow=True)
plt.title("Lotka-Volterra System")
plt.show()
2.5.2. Integration#
scipy.integrate.quad#
Compute a definite integral.
scipy.integrate.quad(func, a, b, args=(), full_output=0, epsabs=1.49e-08, epsrel=1.49e-08,\ limit=50, points=None, weight=None, wvar=None, wopts=None, maxp1=50, limlst=50)
Return y and abserr.
y(float): The integral of func from a to b.
abserr(float): An estimate of the absolute error in the result.
Let’s compute the integral: \( \int_0^4 x^2 dx\)
x2 = lambda x: x**2
ans = integrate.quad(x2, 0, 4) # numerical result
print("x, y = ", ans)
display(Latex("$$ \int_0^4 x^2 dx = \\frac{x^3}{3} \Big|_0^4 = \\frac{4^3}{3} = 21.3333 $$"))
x, y = (21.333333333333332, 2.3684757858670003e-13)
2.5.3. Root finding#
scipy.optimize.root_scalar#
Find a root of a scalar function.
scipy.optimize.root_scalar(f, args=(), method=None, bracket=None, fprime=None, fprime2=None,\ x0=None, x1=None, xtol=None, rtol=None, maxiter=None, options=None)
find a root of a scalar function
from scipy import optimize
def f(x):
return x**2 - x - 1
sol = optimize.root_scalar(f, bracket=[0, 3]) # numerical result
print("numerical result: ", sol.root)
print("\nanalytical result:")
display(Latex("$$ f(x) = x^2 -x - 1 = 0 \Longleftrightarrow x = \\frac{1 \pm \sqrt{5}}{2} = -0.618034, 1.618034 $$"))
numerical result: 1.618033988749895
analytical result:
scipy.optimize.root#
Find a root of a vector function.
scipy.optimize.root(func, x0, args=(), method='hybr', jac=None, tol=None, callback=None, options=None)
def fun(x):
return [x[0] + 0.5 * (x[0] - x[1]) ** 3 - 1.0, 0.5 * (x[1] - x[0]) ** 3 + x[1]]
def jac(x): # Jacbian
return np.array(
[
[1 + 1.5 * (x[0] - x[1]) ** 2, -1.5 * (x[0] - x[1]) ** 2],
[-1.5 * (x[1] - x[0]) ** 2, 1 + 1.5 * (x[1] - x[0]) ** 2],
]
)
sol = optimize.root(fun, [0, 0], jac=jac, method="hybr")
print('numerical result: ', sol.x)
numerical result: [0.8411639 0.1588361]
scipy.optimize.minimize#
Local (multivariate) optimization
scipy.optimize.minimize(fun, x0, args=(), method=None, jac=None, hess=None,\ hessp=None, bounds=None, constraints=(), tol=None, callback=None, options=None)
find the minimum point of
from scipy.optimize import minimize
f = lambda x: (1 - x[0]) ** 2 + 5 * (x[1] - x[0] ** 2) ** 2
x0 = [-1, -1]
res = minimize(f, x0, method="CG", options={"disp": True})
print("\nnumerical result: ", res.x)
Optimization terminated successfully.
Current function value: 0.000000
Iterations: 12
Function evaluations: 84
Gradient evaluations: 28
numerical result: [0.9999993 0.99999854]
scipy.optimize.least_squares#
Least-squares
scipy.optimize.least_squares(fun, x0, jac='2-point', bounds=(- inf, inf), method='trf', ftol=1e-08,\ xtol=1e-08, gtol=1e-08, x_scale=1.0, loss='linear', f_scale=1.0, diff_step=None, tr_solver=None,\ tr_options={}, jac_sparsity=None, max_nfev=None, verbose=0, args=(), kwargs={})
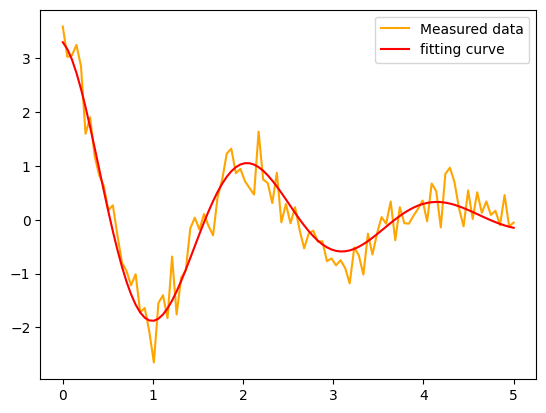
Here, we solve fitting problem.
# Solve a nonlinear least-squares problem with bounds on the variables.
import os
import scipy.optimize as opt
# p: parameters, t: time, y: measured data
fitFunc = lambda p, t: p[0] * np.exp(-p[1] * t) * np.cos(p[2] * t)
errFunc = lambda p, t, y: fitFunc(p, t) - y
np.random.seed(0)
x = np.linspace(0, 5, 100)
y = fitFunc([3, 0.5, 3], x) + np.random.randn(len(x)) / 3
p0 = [1, 1, 1] # Initial guess for the parameters
(p, success) = opt.leastsq(errFunc, p0, args=(x, y))
print("\nnumerical result: ", p)
print("true value: ", [3, 0.5, 3])
nfit = fitFunc(p, x)
plt.plot(x, y, label="Measured data", color="orange")
plt.plot(x, nfit, label="fitting curve", color="red")
plt.legend()
plt.show()
numerical result: [3.296355 0.55072818 2.98677005]
true value: [3, 0.5, 3]